- 图
- 基本概念
- 图的种类
- 度
- 连通图/强连通图
- 连通分量/强连通分量
- 图的构造
- 图的遍历方式
- 深度优先搜索
- dfs 和 bfs 区别
- dfs 搜索过程
- 代码结构
- 深搜三部曲
- 所有可达路径
- 题目描述
- 解题思路
- 代码
- 广度优先搜索
- 使用场景
- 广搜的过程
- 代码框架
图
基本概念
二维坐标中,两点可以连成线,多个点连成的线就构成了图。
图可以是一个节点,或没有节点(空图)
图的种类
有向图
图的边有方向
无向图
图的边无方向
加权有向图
有向图并且边是有权值的
加权无向图
度
无向图:连接该节点的边数就是度
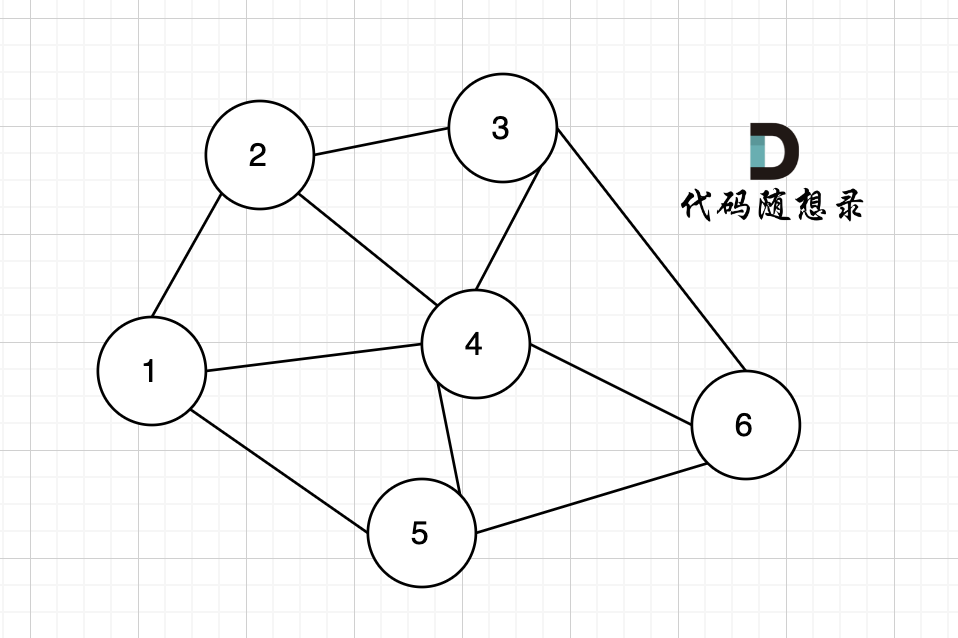
节点 4 的度为 5,其他节点度都是 3
有向图
- 入度:指向该节点的边数
- 出度:从该节点出发的边数
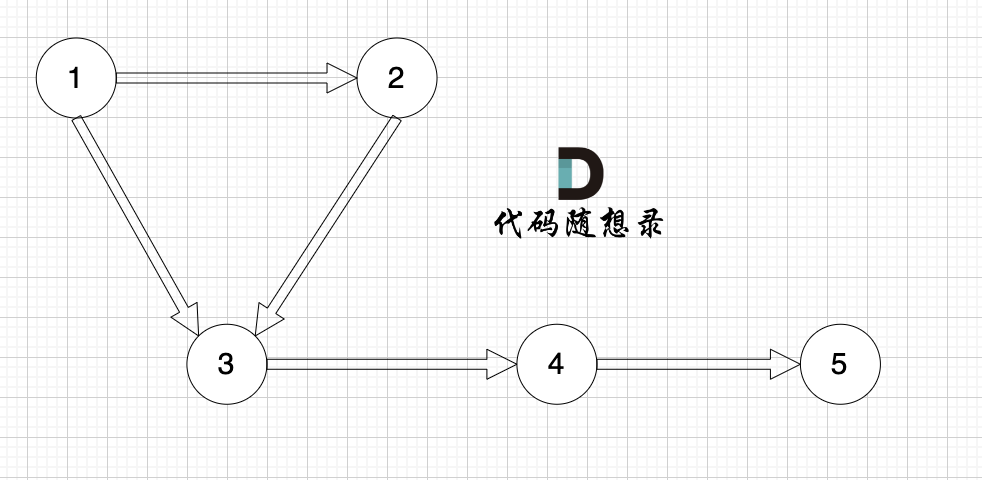
节点 1 入度为 0,出度为 2
连通图/强连通图
无向图所有节点都可以到达,称为连通图,否则为非联通图
如 image1,所有节点都可以到达,所以是连通图
如图就是非连通图
有向图任何两个节点是可以相互到达,称为强连通图,否则为非强连通图
如 image2,节点 1 能到节点 2,但节点 2 无法到达节点 1,所以是非强连通图
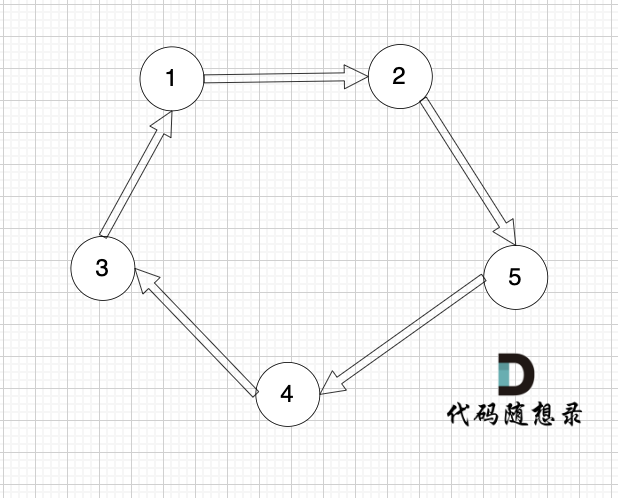
这个才是强连通图
连通分量/强连通分量
无向图的极大连通子图称为该图的一个连通分量
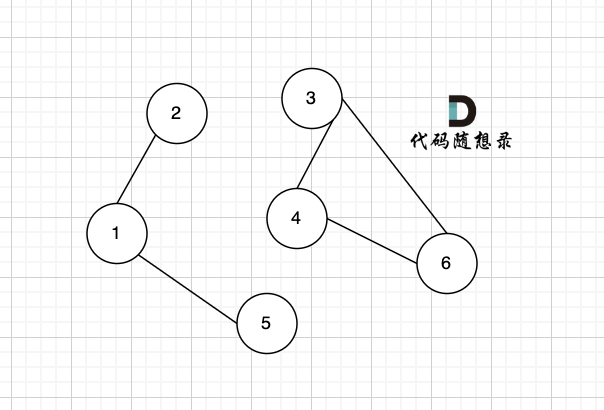
如 image3 中
- 节点 1、2、5 构成的子图就是该无向图的一个连通分量
- 节点 3、4、6 构成的子图也是该无向图的另一个连通分量
- 节点 3、4 构成的子图不是连通分量,因为必须是极大连通子图
有向图的极大强连通子图称为该图的一个强连通分量
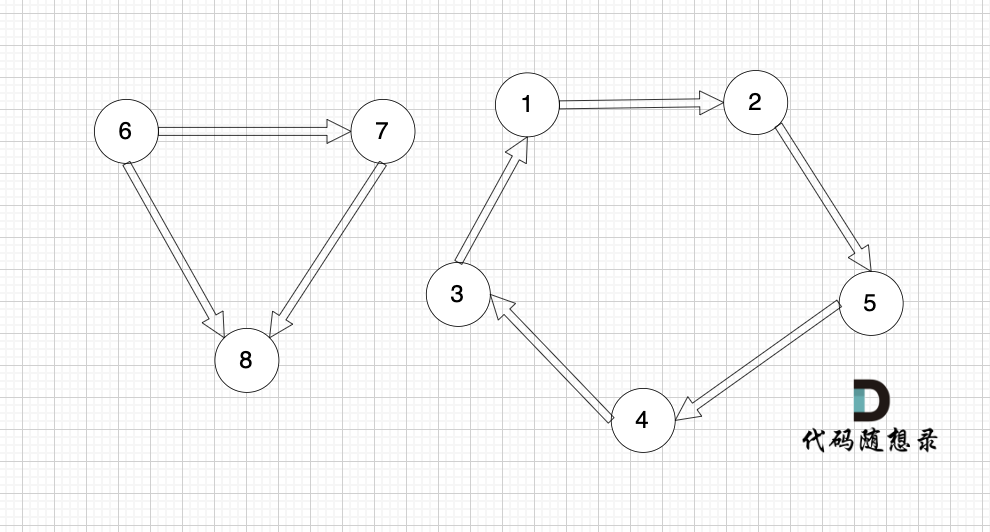
- 节点 1、2、3、4、5 构成的子图就是该有向图的一个强连通分量,强连通图、极大
- 节点 6、7、8 构成的子图不是该有向图的一个强连通分量,不是强连通图
- 节点 1、3、5 构成的子图不是该有向图的一个强连通分量,不是极大连通子图
图的构造
如何使用代码表示一个图?
三种方法:邻接表、列阶矩阵、类
类 “朴素存储”
有 n 条边就定义数组长度为
n*2如图 5,图中有 8 条边,定义
8*2的数组let graphArr = [ [6, 7], [6, 8], [7, 8], [1, 2], [2, 5], [5, 4], [4, 3], [3, 1], ]数组第一行 6 7,表示节点 6 指向节点 7,以此类推
可以使用数组、map 或类表示
- 优点:直观,节点与节点的关系都很容易理解
- 缺点:不方便查找节点的关系,如节点 1 和节点 6 是否相连,需要全部遍历 深搜和广搜都不会使用这种存储方式
邻接矩阵
用一个二维数组表示图的边,从节点的角度表示图,有多少节点就申请多大的二维数组
如图 5,需要申请
8*8的二维数组例如: grid[2][5] = 6,表示 节点 2 连接 节点 5 为有向图,节点 2 指向 节点 5,边的权值为 6
- 节点 i 和节点 j 相连,
graph[i][j] = true - 节点 i 和节点 j 不相连,
graph[i][j] = false
邻接矩阵的优点:
- 表达方式简单,易于理解
- 检查任意两个顶点间是否存在边的操作非常快
- 适合稠密图,在边数接近顶点数平方的图中,邻接矩阵是一种空间效率较高的表示方法。
缺点:
- 遇到稀疏图,会导致申请过大的二维数组造成空间浪费 且遍历 边 的时候需要遍历整个 n * n 矩阵,造成时间浪费
- 节点 i 和节点 j 相连,
邻接表
使用数组+链表表示,从边的角度表示图,有多少边才会申请对应大小的链表
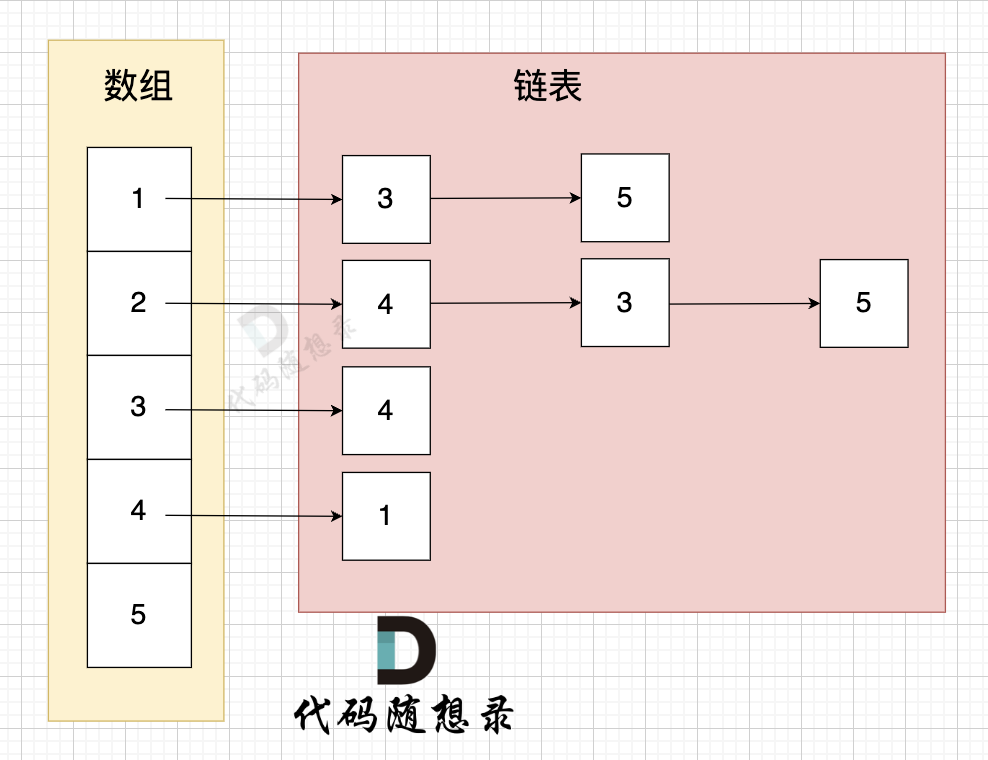
- 节点 1 指向节点 3 和节点 5
- 节点 2 指向节点 4、节点 3、节点 5
- 节点 3 指向节点 4
- 节点 4 指向节点 1
邻接表的优点:
- 对于稀疏图的存储,只需要存储边,空间利用率高
- 遍历节点连接情况相对容易
缺点:
- 检查任意两个节点间是否存在边,效率相对低,需要 O(V)时间,V 表示某节点连接其他节点的数量。
- 实现相对复杂,不易理解
示例:
let n = 5 // 节点数
let m = 5 // 边数
let edges = [
[1, 3],
[3, 5],
[1, 2],
[2, 4],
[4, 5],
]
// 邻接矩阵构建
let graph = new Array(n + 1).fill(0).map(() => new Array(n + 1).fill(0))
for (let i = 0; i < m; i++) {
let [x, y] = edges[i]
graph[x][y] = 1
}
console.log('邻接矩阵:', graph)
// 邻接表构建
let graph1 = new Array(n + 1).fill(0).map(() => [])
for (let i = 0; i < m; i++) {
let [x, y] = edges[i]
graph1[x].push(y)
}
console.log('邻接表:', graph1)
输出结果如下:
// 邻接矩阵
graph = [
[0, 0, 0, 0, 0, 0],
[0, 0, 0, 1, 0, 0],
[0, 0, 0, 0, 1, 0],
[0, 0, 0, 0, 0, 1],
[0, 0, 0, 0, 0, 1],
[0, 0, 0, 0, 0, 0],
]
// 邻接表
graph = [[], [3, 2], [4], [5], [5], []]
图的遍历方式
- 深度优先搜索 dfs
- 广度优先搜索 bfs
如二叉树的遍历方式:
- 递归遍历,dfs
- 层序遍历,bfs
深度优先搜索
dfs 和 bfs 区别
- 广度优先搜索(BFS)从根节点开始,沿着树的宽度遍历所有节点,然后向下深入
- 深度优先搜索(DFS)从根节点开始,沿着树的深度遍历尽可能深的节点,然后回溯
dfs 搜索过程
回忆下二叉树的深度搜索过程:
以前序遍历为例:
从根节点开始
- 首先访问根节点,记录或处理该节点的值
递归访问左子树
- 如果当前节点有左子节点,则递归进入左子树
- 在左子树中,重复步骤 1 和步骤 2,直到到达左子树的最底部(即左叶子节点)
回溯并访问右子树
- 当左子树访问完成后,回溯到当前节点
- 如果当前节点有右子节点,则递归进入右子树
- 在右子树中,重复步骤 1 和步骤 2
重复以上步骤
- 按照“先左后右”的顺序,递归访问每个节点的左子树和右子树
- 直到所有节点都被访问完
那么在图中的 dfs 过程是怎样的?
如图 1 中,搜索从节点 1 到节点 6 的所有路径,深搜的过程如下:
- 从节点 1 开始,访问节点 1,记录路径 [1]
- 访问节点 1 的邻接节点 2,记录路径 [1, 2]
- 访问节点 2 的邻接节点 3,记录路径 [1, 2, 3]
- 访问节点 3 的邻接节点 4,记录路径 [1, 2, 3, 4]
- 访问节点 4 的邻接节点 5,记录路径 [1, 2, 3, 4, 5]
- 访问节点 5 的邻接节点 6,记录路径 [1, 2, 3, 4, 5, 6]
- 到达节点 6,记录路径 [1, 2, 3, 4, 5, 6],结束搜索
- 回溯到节点 5,继续搜索节点 5 的其他邻接节点,直到搜索完所有路径 .....
因此,dfs 的过程关键就亮点:
- 搜索方向,认准一个方向,直到碰壁,再换方向继续搜索
- 回溯,搜索完一个方向后,回到上一个节点,继续搜索其他方向
代码结构
dfs 的代码结构也就是回溯算法的代码结构:
function dfs(参数) {
if (终止条件) {
存放结果;
return;
}
for (选择:本节点所连接的其他节点) {
处理节点;
dfs(图,选择的节点); // 递归
回溯,撤销处理结果
}
}
深搜三部曲
确认递归函数、参数
function dfs(参数) {}一般需要二维数组保存所有路径,一维数组保存单一路径,定义全局变量即可
let result = [] // 保存符合条件所有路径 let path = [] // 保存单一路径 function dfs(参数) {}确认终止条件
if (终止条件) { result.push([...path]) // 复制路径 return }处理目前搜索节点出发的路径
for 循环遍历目前搜索节点所连接的其他节点
for (选择:本节点所连接的其他节点) { path.push(选择的节点) // 处理节点 dfs(图,选择的节点) // 递归 path.pop() // 回溯,撤销处理结果 }
所有可达路径
题目描述
【题目描述】
给定一个有 n 个节点的有向无环图,节点编号从 1 到 n。请编写一个程序,找出并返回所有从节点 1 到节点 n 的路径。每条路径应以节点编号的列表形式表示。
【输入描述】
第一行包含两个整数 N,M,表示图中拥有 N 个节点,M 条边
后续 M 行,每行包含两个整数 s 和 t,表示图中的 s 节点与 t 节点中有一条路径
【输出描述】
输出所有的可达路径,路径中所有节点的后面跟一个空格,每条路径独占一行,存在多条路径,路径输出的顺序可任意。
如果不存在任何一条路径,则输出 -1。
注意输出的序列中,最后一个节点后面没有空格! 例如正确的答案是 1 3 5,而不是 1 3 5, 5 后面没有空格!
【输入示例】
5 5
1 3
3 5
1 2
2 4
4 5
【输出示例】
1 3 5
1 2 4 5
提示信息
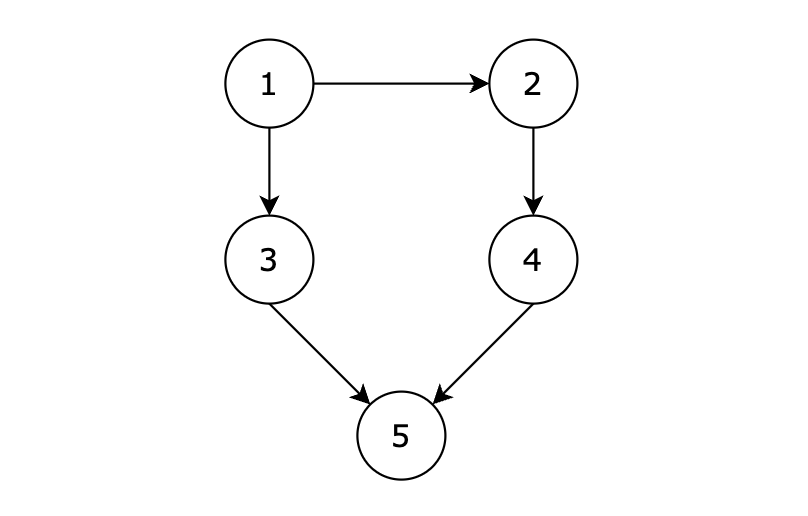
用例解释:
有五个节点,其中的从 1 到达 5 的路径有两个,分别是 1 -> 3 -> 5 和 1 -> 2 -> 4 -> 5。
因为拥有多条路径,所以输出结果为:
1 3 5
1 2 4 5
或
1 2 4 5
1 3 5
都算正确。
数据范围:
- 图中不存在自环
- 图中不存在平行边
- 1 <= N <= 100
- 1 <= M <= 500
解题思路
相似题目:797.所有可能的路径
图的存储
邻接矩阵存储
二维数组
n * n表示图结构本题节点标号从 1 开始,为了节点标号与下标对齐,定义
n + 1 * n + 1表示图结构let graph = new Array(n + 1).fill().map(() => new Array(n + 1).fill(0))输入 m 条边,构造方式如下
while (m--) { let [x, y] = readline().split(' ').map(Number) // 1表示节点x指向节点y graph[x][y] = 1 }邻接表存储
数组 + 链表,以边的数量表示图,有多少边申请对应大小的链表
构造数组,数组捏的元素是链表
let graph = new Array(N + 1).fill(0).map(() => new Array())数入 m 个边,构造方式如下
while (m--) { let [x, y] = readline().split(' ').map(Number) graph[x].add(y) }
深度优先搜索
深搜三部曲:
确定递归函数、参数
- 参数 1:当前遍历节点 x
- 参数 2:终点 n,当 x===n 时搜索结束
定义全局变量
result和pathlet result = [] let path = [] function dfs(x, n) {}确定终止条件
当目前遍历的节点是最有一个节点 n 的时候,就找到了一条从出发点到终止点的路径
if (x === n) { result.push([...path]) return }处理目前搜索节点出发的路径
遍历目前搜索节点 x 的所有邻接节点,递归调用 dfs 函数
for (let i = 1; i <= n; i++) { // 遍历目前搜索节点 x 的所有邻接节点 if (graph[x][i] === 1) { // 邻接节点存在边 path.push(i) // 遍历到的节点加入到路径 dfs(i, n) // 递归调用 dfs path.pop() // 回溯,撤销处理结果 } }
代码
ACM 格式
797. 所有可能的路径 代码如下
var allPathsSourceTarget = function (graph) {
const result = []
const path = []
const dfs = (node) => {
path.push(node) // 将当前节点加入路径
// 如果到达目标节点(最后一个节点),将路径加入结果
if (node === graph.length - 1) {
result.push([...path])
path.pop() // 回溯,撤销当前节点
return
}
// 遍历当前节点的所有邻接节点
for (let i = 0; i < graph[node].length; i++) {
dfs(graph[node][i]) // 递归访问邻接节点
}
path.pop() // 回溯,撤销当前节点
}
dfs(0)
return result
}
- path.push(node) 放在递归调用之前,因为当前节点是路径的一部分,必须在递归调用之前加入路径
- path.pop() 放在递归调用之后,是为了回溯到上一个节点,撤销当前节点的处理
- 如果将 path.push(node) 放在循环中,会导致路径中出现重复的节点,路径结果不正确
示例:
const graph = [
[1, 2], // 节点 0 指向节点 1 和节点 2
[3], // 节点 1 指向节点 3
[3], // 节点 2 指向节点 3
[], // 节点 3 无邻接节点
]
上述代码最终输出结果为:
[
[0, 1, 3],
[0, 2, 3]
]
如果将 path.push(node) 放在循环中,会导致路径中出现重复的节点,路径结果不正确
for (const neighbor of graph[node]) {
path.push(node); // 错误:在循环中加入当前节点
dfs(neighbor);
path.pop(); // 回溯,撤销当前节点
}
输出为:
[
[0, 0, 1, 3],
[0, 0, 2, 3]
]
广度优先搜索
使用场景
寻找最短路径:在一个图中,从某个节点到另一个节点的最短路径。
在图中寻找最短路径,从起始点为中心一圈一圈进行搜索,一旦遇到终点,记录之前的路径就是最短路径。
广搜的过程
回忆二叉树的层序遍历:
从根节点开始:
- 首先访问根节点,将其加入队列
- 队列用于存储当前层的节点,并逐层处理
逐层访问节点
- 从队列中取出一个节点,记录或处理该节点的值
- 将该节点的所有子节点(或邻接节点)加入队列
重复以上步骤
- 按照队列的顺序,依次处理每个节点
- 每次从队列中取出一个节点,访问其子节点,并将子节点加入队列
终止条件
- 当队列为空时,说明所有节点都已被访问,搜索结束
对于图的广度优先搜索
核心思想是从起点开始,按距离递增的顺序向外探索,确保最先到达终点的路径一定是最短路径
bfs 的“一圈一圈”搜索本质是逐层探索,距离起点越近的节点越先被访问。
代码框架
用什么容器来遍历元素?
- 队列:先进先出,加入元素和弹出元素的顺序没有改变,保证每一圈都是一个方向转
- 栈:后进先出,加入元素和弹出元素的顺序相反,第一圈顺时针,第二圈逆时针...
const directions = [
[0, 1], // 右
[1, 0], // 下
[-1, 0], // 上
[0, -1], // 左
]
// grid 是地图(二维数组)
// visited 是标记访问过的节点的二维数组
// x, y 是起始节点的坐标
function bfs(grid, visited, x, y) {
const rows = grid.length
const cols = grid[0].length
const queue = [] // 定义队列
queue.push([x, y]) // 起始节点加入队列
visited[x][y] = true // 标记起始节点为已访问
while (queue.length > 0) {
const [curX, curY] = queue.shift() // 从队列中取出当前节点
// 遍历当前节点的四个方向
for (const [dx, dy] of directions) {
const nextX = curX + dx
const nextY = curY + dy
// 检查是否越界
if (nextX < 0 || nextX >= rows || nextY < 0 || nextY >= cols) {
continue
}
// 检查是否已经访问过
if (!visited[nextX][nextY]) {
queue.push([nextX, nextY]) // 将新节点加入队列
visited[nextX][nextY] = true // 标记为已访问
}
}
}
}
方向数组 directions
- 用于表示四个方向(右、下、上、左)的坐标偏移量。
队列初始化
- 使用 queue 存储当前需要访问的节点
- 起始节点 (x, y) 加入队列,并标记为已访问
BFS 主循环
- 每次从队列中取出一个节点,检查其四个方向的邻接节点
- 如果邻接节点未越界且未访问过,则将其加入队列,并标记为已访问
终止条件
- 当队列为空时,说明所有可达节点都已访问,搜索结束
京ICP备2022027737号
Copyright © 2022 - present @wangxiang